HUBOT – Hubotics

Hubot Face
The HUBOT robot was made by the Hubotics company. It is a unique robot and was intended to be the Ultimate appliance for the 80’s. The HUBOT robot was designed as a home appliance. Not just an educational robot, not just for entertainment, nor a toy. It is supposed to be the “ultimate home appliance of the 80’s”. Hubotics designed HUBOT as a Servant, teacher, entertainment center, and mobile computer system all in one. The robot has extra expansion slots so it could be expanded and upgraded. It was first shown at the January 1984 Winter Consumer Electronics show.
Hubot Features
HUBOT is definitely a unique robot and has the following specifications:
– 45″ height, 22″ wide, approx 110 lbs
– Two main drive motors (speed approx 1 foot per second)
– HuBrain Computer based on z80A with 64K RAM
– 12″ TV/CRT display (80 columns 24 lines)
– CP/M 2.2 based OS
– SpeakEasy (Instruction Language)
– 64 key ASCII keyboard (detachable)
– 5.25″ floppy disk drive
– Two Joystick ports (Atari compatible)
– Serial port
– Parallel/centronics port
– Charger port (used 12V car charger)
– Main battery 12v 40Ah
– TV tuner built-in for TV display on monitor
– AM/FM Stereo Cassette deck
– Dual speakers
– Atari 2600 game system built-in
– SSI 263P Speech synthesizer (unlimited vocabulary)
– Sonar sensor for distance measurement
– OSB collar can rotate to aim sonar in different directions
– LED lighting on OSB collar
– Built-in clock
– Three infrared sensors for obstacle avoidance
Options included:
– Serving tray
– HUBOT cover
– Home base
– 2nd 5.25″ floppy disk drive
– Printer (40 column dot matrix)
Planned options:
– Voice command (speech recognition)
– Articulated arm (mounted on side of robot)
– Sentry package (Heat, smoke, and intrusion alarm)
– Auto recharger for main battery
– Vacuuming (light duty dual roller)
– Remote control
– Cordless telephone and 300 baud modem
– Smart servant for appliance control (probably X10 based)
The HUBOT uses a differential drive with two dive motors near the front corners of the base. There is a large castor in the rear so there are three wheels total to give it support. Both of the main drive wheels are equipped with encoders.
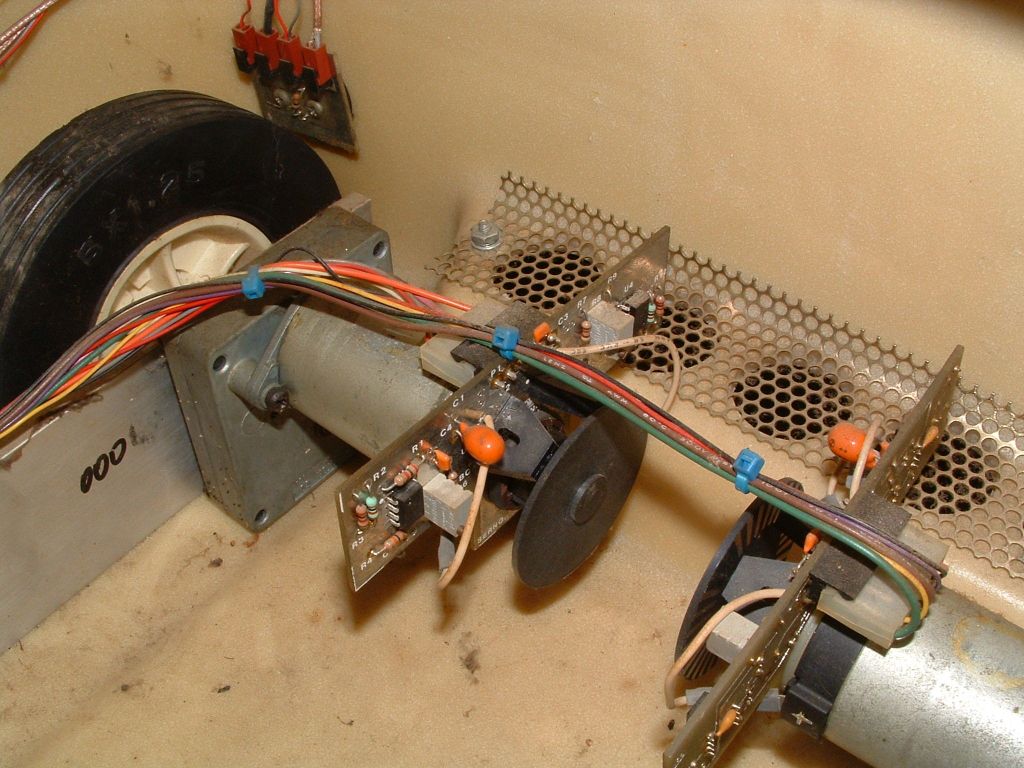
HUBOT drive motors with encoders
The CP/M HuBrain is somewhat similar in operation to a Kaypro computer but was custom designed just for Hubot. It has an expansion bus that seem similar to the classic S-100 bus but the cards are narrower and standard S-100 boards won’t fit. It has four Z80A processors on board. Besides the obvious one for the main CPU board there are also processors on the video board, control board, and motor controller board.
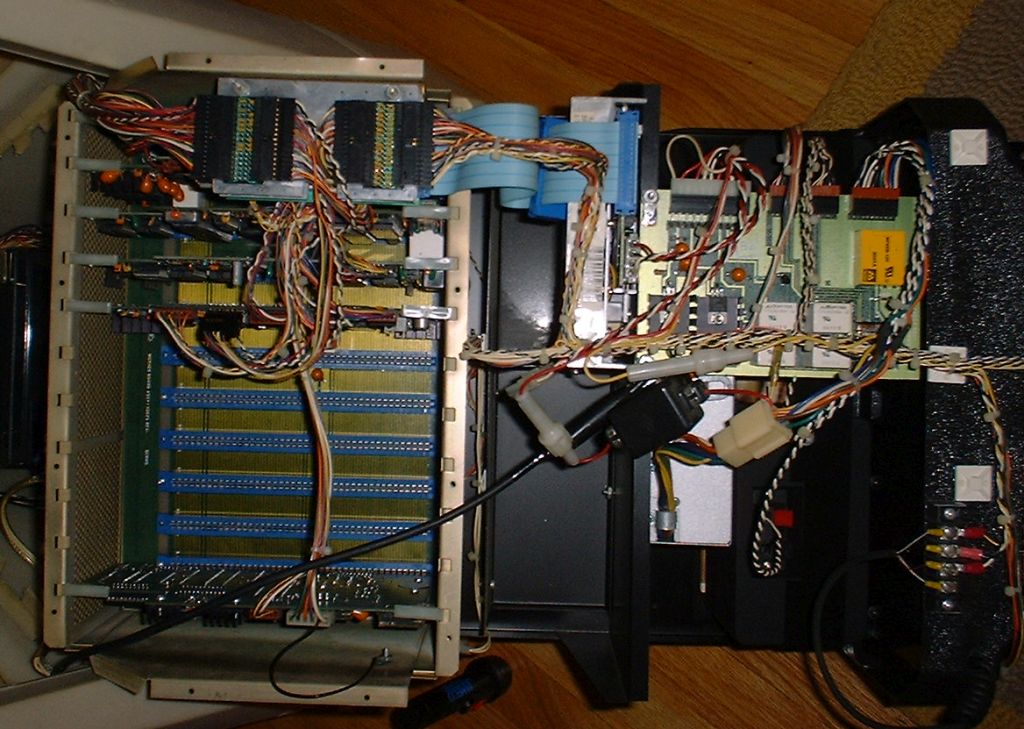
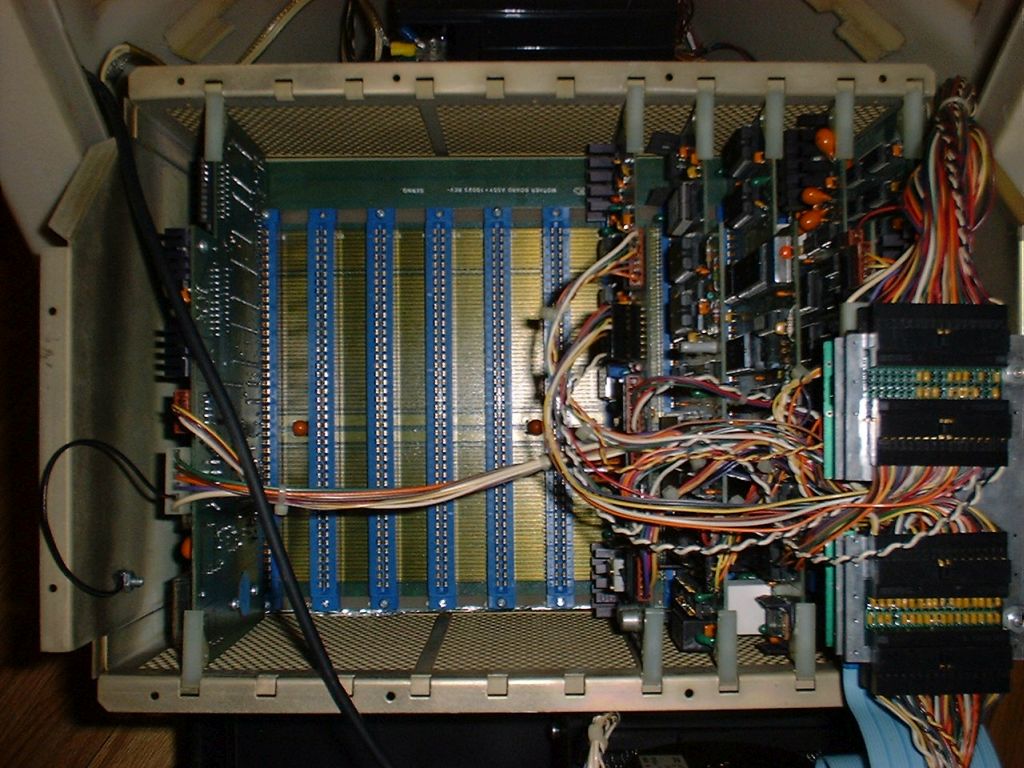
Hubot Electronics
-

- HUBOT Card cage
-

- HUBOT System board

-

- HUBOT Video board
-

- HUBOT Disk controller board

-

- HUBOT Sense board

-

- HUBOT Control board

-

- HUBOT motor control board

Here are some more details about each of the main boards in the robot:
HUBOT System Processor
- Z80A CPU
- 8K Main ROM
- 64K Dynamic RAM (Eight 4164 DRAM chips)
From what I have found it appears that upon RESET the 8K Main ROM is available for read access and it is active in the memory map. It will start running the code from the beginning of that EPROM which will then fill the entire 64K of RAM with 0’s to clear it. All 64K of RAM seems to be active for writes at this time. Then the 8K ROM image on the main ROM from 0000h-1fffh is copied to the same location with writes going to RAM. Then there is an OUT to address 10h with a value of 00h which I believe switches out the EPROM so that the full 64K of RAM memory is active which now contains an image of the 8K main ROM. It then jumps to address 0100h to read the boot loader from the floppy disk that can in turn bring up the rest of CP/M and then load the custom Hubot software.
HUBOT System I/O (Disk controller board)
- WDC FD1793PC Floppy Disk Controller w/WD1691PE
- Z80A CTC counter/timer chip
- Two Z80A SIO Serial chips
This board is the main system I/O board in the robot and has the floppy disk controller for up to two 5.25″ 360K (40 track double-sided) floppy drives. It also provides two serial ports for serial communications. There is a Z80A CTC counter/timer chip on the board but I don’t what that is used for yet. This board contains a large relay that appears to switch power to an on-board 7805 +5V regulator so it appears that there is some power management so save power.
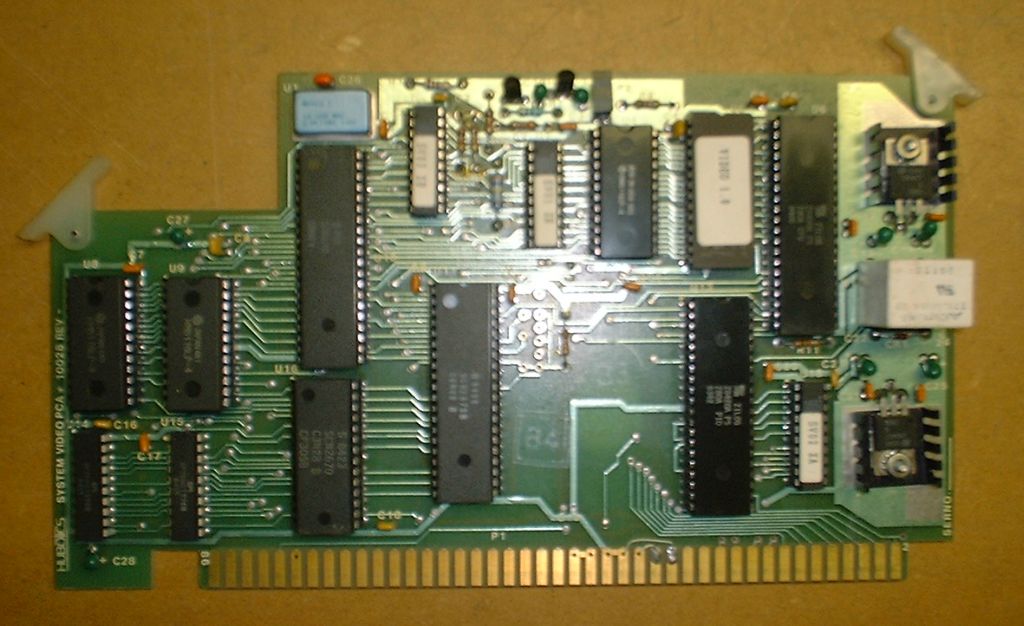
HUBOT Video Board
- Z80A CPU
- 8K ROM
- 2K SRAM (6116)
- Z80A PIO
- Signetics SCN2674 Advanced Video Display Controller (AVDC)
- Signetics SCB2673 Video Attributes Controller (VAC)
- 4K video SRAM (Two 6116 chips)
This board is based on the Signetics video chip set. Let me say that this is a unique chipset that I haven’t seen used in any other devices. Eventually I would like to disassemble the ROM contents to help learn exactly how this board functions and also how it talks to the main system board. Schematics would be very helpful here.
HUBOT Control Processor Board
- Z80A CPU
- 16K ROM
- 8K SRAM (6264)
- 2K SRAM (6116)
- Z80A SIO Serial chip
- Z80A CTC counter/timer chip
I believe this board is responsible for controlling some of the main robot functions and may control the relays, etc to swtich in different features. I’ll update this page with more details as I uncover them.
HUBOT Control I/O board
- SSI 263P Speech chip (SC-02)
- Z80B PIO chip
- ADC0804 Analog to digital converter
- Ultrasonic sensor circuitry
I believe this board is directly controlled by the HUBOT Control Processor board. From the components used on the board it appears that this controls the main robot features like the control of the relays to switch and enable different features as well as some of the sensing like the sonar sensor for distance measurement.
HUBOT Motor Control Board
- Z80B CPU
- 8K ROM
- 2K SRAM (6116)
- Two Z80B PIO chips
- Z80A CTC counter/timer chip
- Two large relays to provide direction control to main motors
- Two large TIP145 (driven by TIP122’s) to provide on/off PWM to power each drive motor
- Encoder inputs for the main drive motors
This board is used to control the main drive motors. It has the electronics to control each motor as well as feedback from each motor for closed loop control.
Once someone became familiar with their new HUBOT robot they would get a certificate like this one:
HUBOT certificate
At least a couple of the HUBOT robots are still alive. More technical details and pictures coming as time permits.
I have helped revive several of these HUBOT robots and have a working example as part of the robot collection. It would be a huge help maintaining these if the schematics or any source code could be found. If you happen to have any technical docs on these please let me know! Even spare parts or robots in any condition would be great.